|
AN SCALAR MACHINE VISION
POSITIONING METHOD
FOR A PRODUCT OR A PLACE
POSITION DETECTION
WITH A AUTOMATICAL
CAMERA AND SEARCH IMAGE SELECTION
Intelligent gripper is an material handling method where e.g. numerically
located material handling transfer units are more accurate repositioned by using new machine vision teach / search algoritm. Developed system provides higher productivity with
increased security on multi technical machinery areas such in tower cranes, mobile cranes, transfer conveyors.
Repositioning demo New |
|
Methods patent |
GRAB – TEACH - CONNECT INFO – SELECT – SEARCH - SHOW
Either with manual driven or automatical unit, a PC with a frame grabber is used to grab one image from a camera view towards region of interest. From this single hole image only a part of this image is selected and saved for future use for repositioning. To this saved part of a image is connected current machine position values, used camera, search algorithm parameters etc. While repositioning when machinery is driven towards the next or known saved image, a saved part of image is selected from
the database automatically for machine vision system according the position system values.
|
| When frame grabber grabs images, the machine vision system uses newest search algorithms to find saved nearest image portion from a single frame grabber image. When a image portion match is found from the grabbed image, it is possible to display and drive material handling unit according this pre-teach image portion position. For the driver it’s possible to show on a live video display distance and direction to this pre-teach image position. An image portion based positioning is easy to
operate several camera positioning method for solutions where the driver can concentrate to drive the machinery. Pre-teach is easy to do while element assembly, disconnection of the load etc. |
AUTOMATIC CAMERA SELECTION AND CONTROL
While machine positioning values change , nearest saved image portion location will loaded to active machine vision memory. In pre-teach used video camera is switched automatically. The driver can continue driving safely to goal direction keeping his hands at machine controllers. Cameras used in the system can be wireless or other fixed camera like for security surveillance used cameras.
|
 |
| Pre-teach first image portion for future use. An image portion pre-teach is done in a few seconds. In manual mode the driver only tabs the suitable display position and selects one pre-programmed image size. The new image portion is immediately ready to use for positioning purposes. | |
While repositioning found
image portion off position is measured from live video. Positions can be shown by an simple display ’distancy needle’ which correlates off position from teach and current position. |
| This above shown example is only a one small part of these recently developed options which can be received with this new vision technology and wireless video data transfer.
|
|
HIGHER PRODUCTIVITY WITH A BETTER WORKING SECURITY
Developed method provide for numeric controls an new graphic dimension which can be easily adapted to any numeric positioned either manual or automatically driven material handling system.
|
| Sime searches for innovative pilot customers and licence customers for this new numeric position based vision technology. |
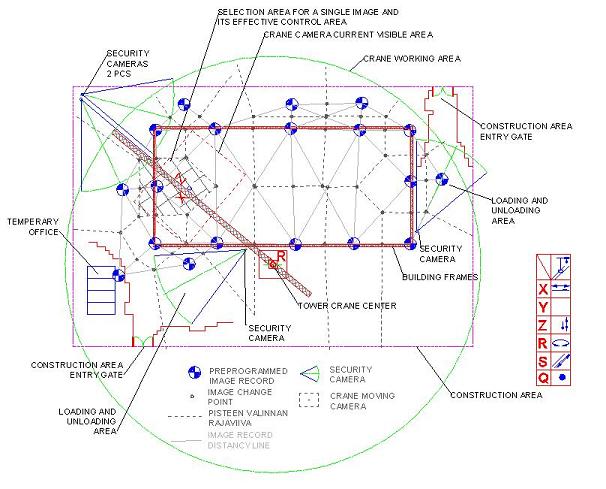
While image is programmed to the database, it includes several time and position values of machinery. While driving the equipment, cameras and images will chosen automaticly according machinery current position.
In the drawing above, image programming points can be seen in blue. While driving the unit, machine vision images and cameras will be selected from nearest image record. On grey color is drawn each image record X-Y line (2D) but also axis like Z-can be included to distance (3D).
When teached image is found, computer either shows or corrects current position according teach image.
Above system works with any numeric positioned machinery like with tower, mobile and industry cranes. In a case that no numeric control is available, we have used our own wireless GPS positioning with our visual image repositionning as 'add on'-tool to demonstrate customers this new technology.
|
STANDARD NUMERIC REPOSITIONING
Even we have the new vision based repositioning system, in some cases the old vehicle position based repositioning is enough accurate. SIME has a know-how about database intelligent SQL-controlled FULL or SEMI automatical positioning systems. In these systems positioning is done according the consumption that Numeric Control (NC) position is correct.
STRUCTURAL CHANGES
An positioning professional understand that any load carrying structure will bend according how effective loads variate and where those loads locate in the structure. The amount of structure changes is depending from many details and therefore predictability with current calculation and estimation methods is very difficult.
MOTOR SLIP AND WHEEL SLIDE
Currently used motor technology is accurate but two motors will work differently if the load is not located symmetrically. An option that systems every motor has feed back to control system is an option but then 'standard' equipment can not used. Even with motor feed back friction will variate when ever conditions variate.
WIND, TIDE AND OTHER NO PREMONITORY FACTORS
For accurate positioning there will always be external forces which may effect to repositioning results.
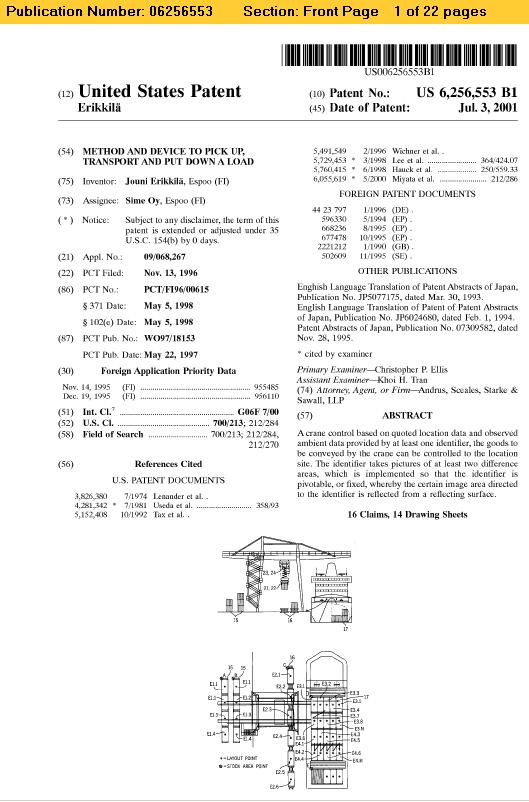
To read about standard repositioning and using databases read SIME
US Patent documentation.
Documentation also explains partly using standard working points and using layouts in those points. We have delivered several programs working like in in patent description part explained. |
|
 |
|
|
 SIME OY
SIME OY
